NASA Joystick(2015)
NASA Joystick




Goal-
One joystick to control rovers and robot arms
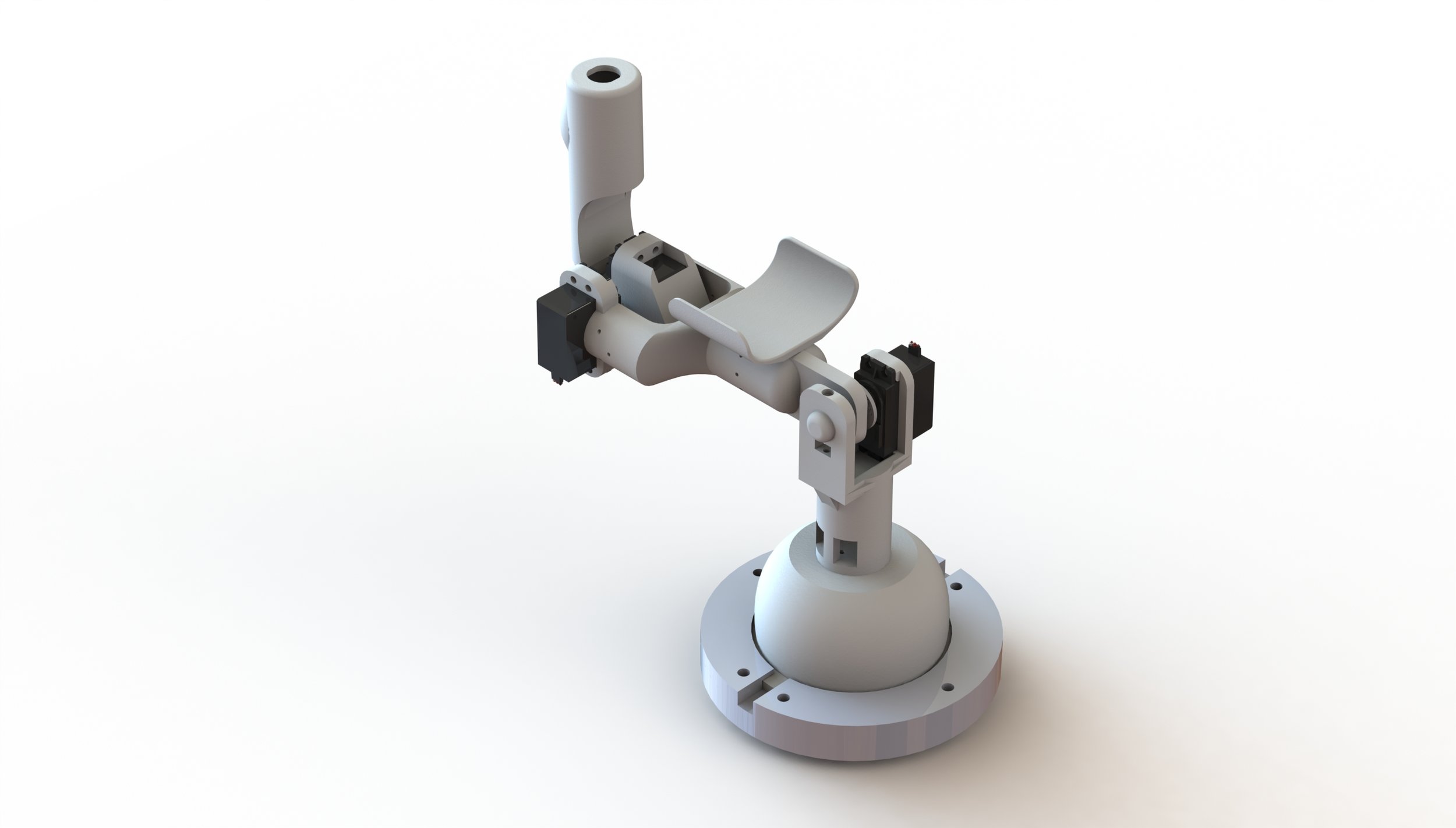
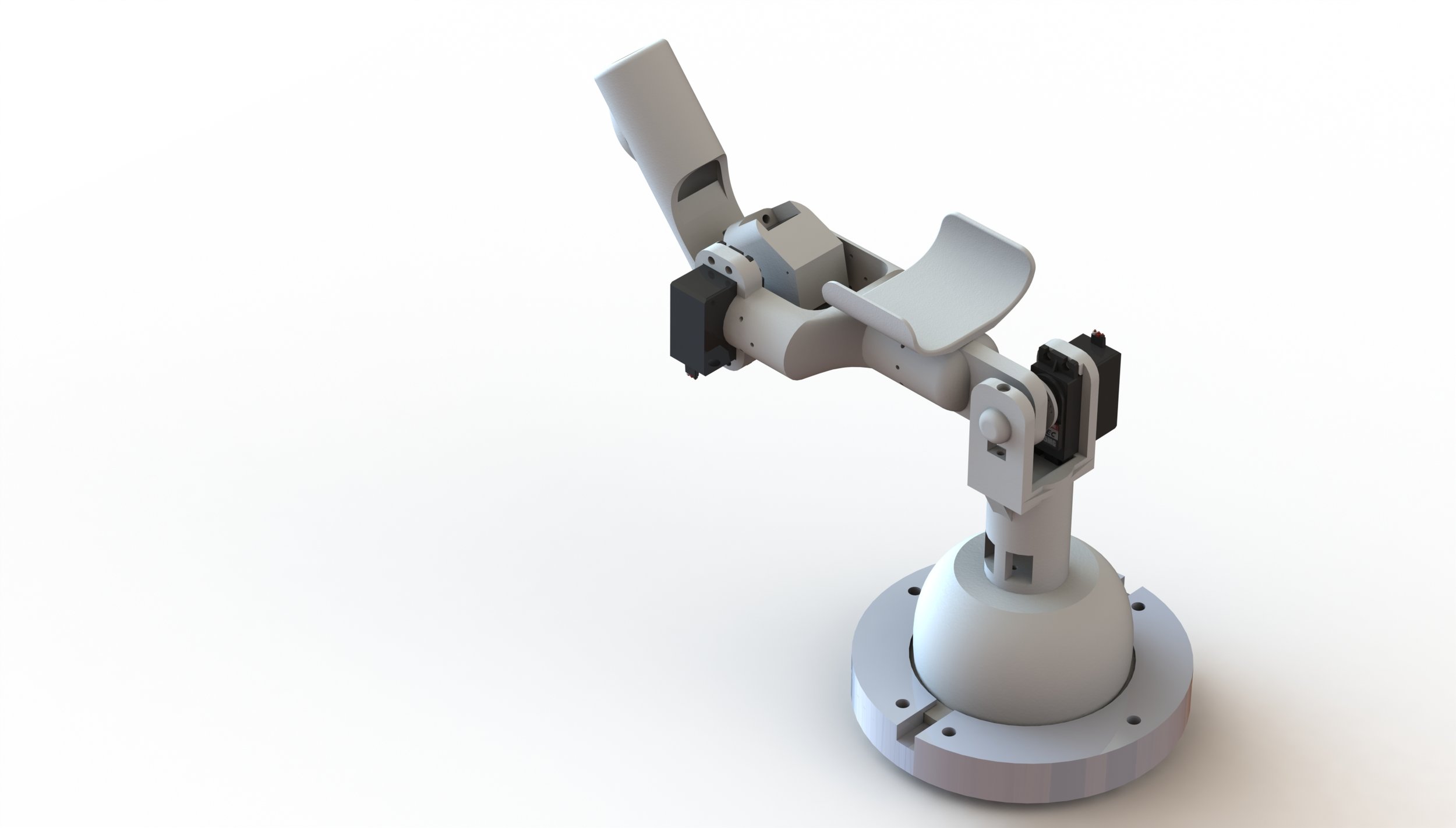
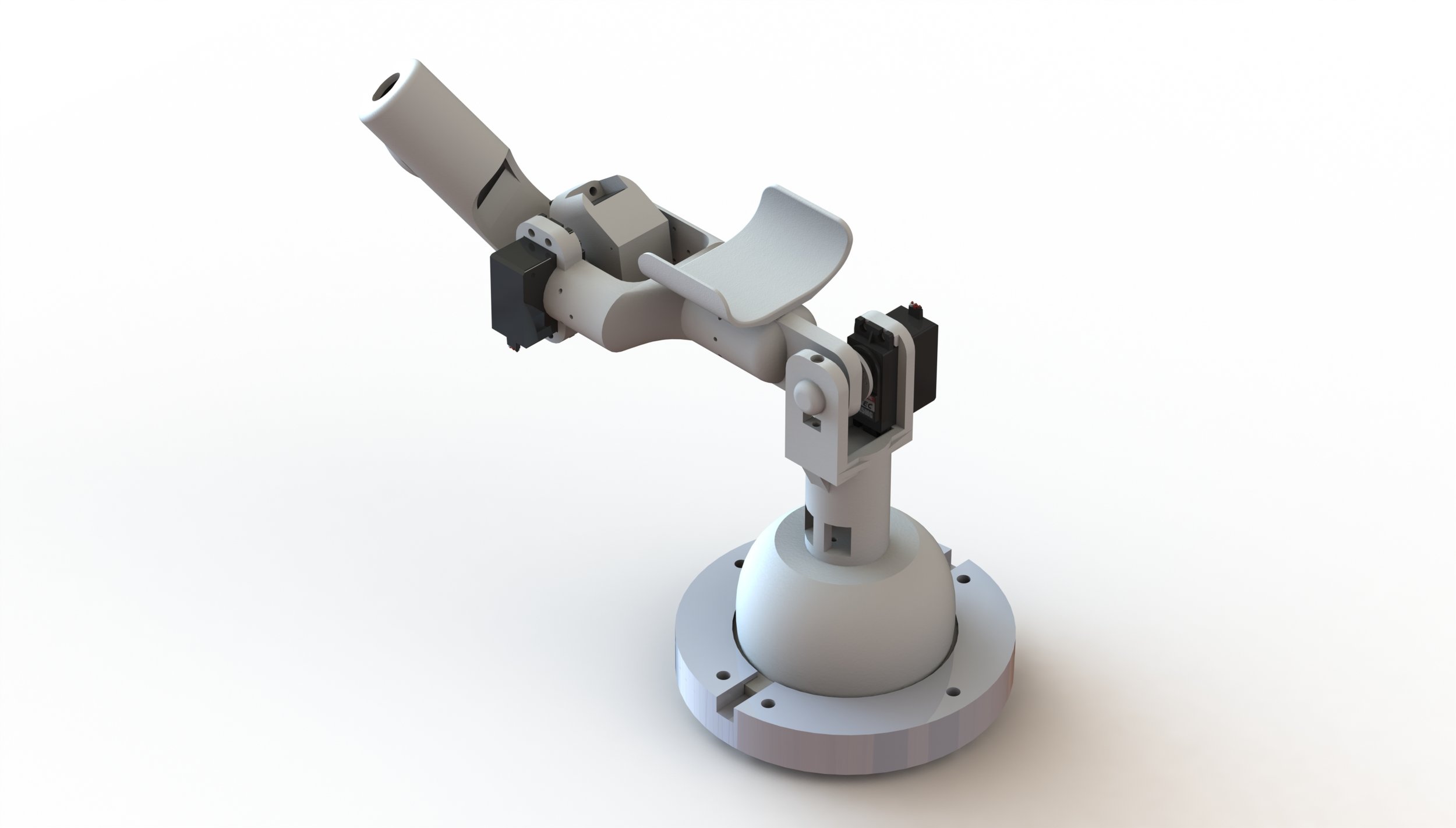
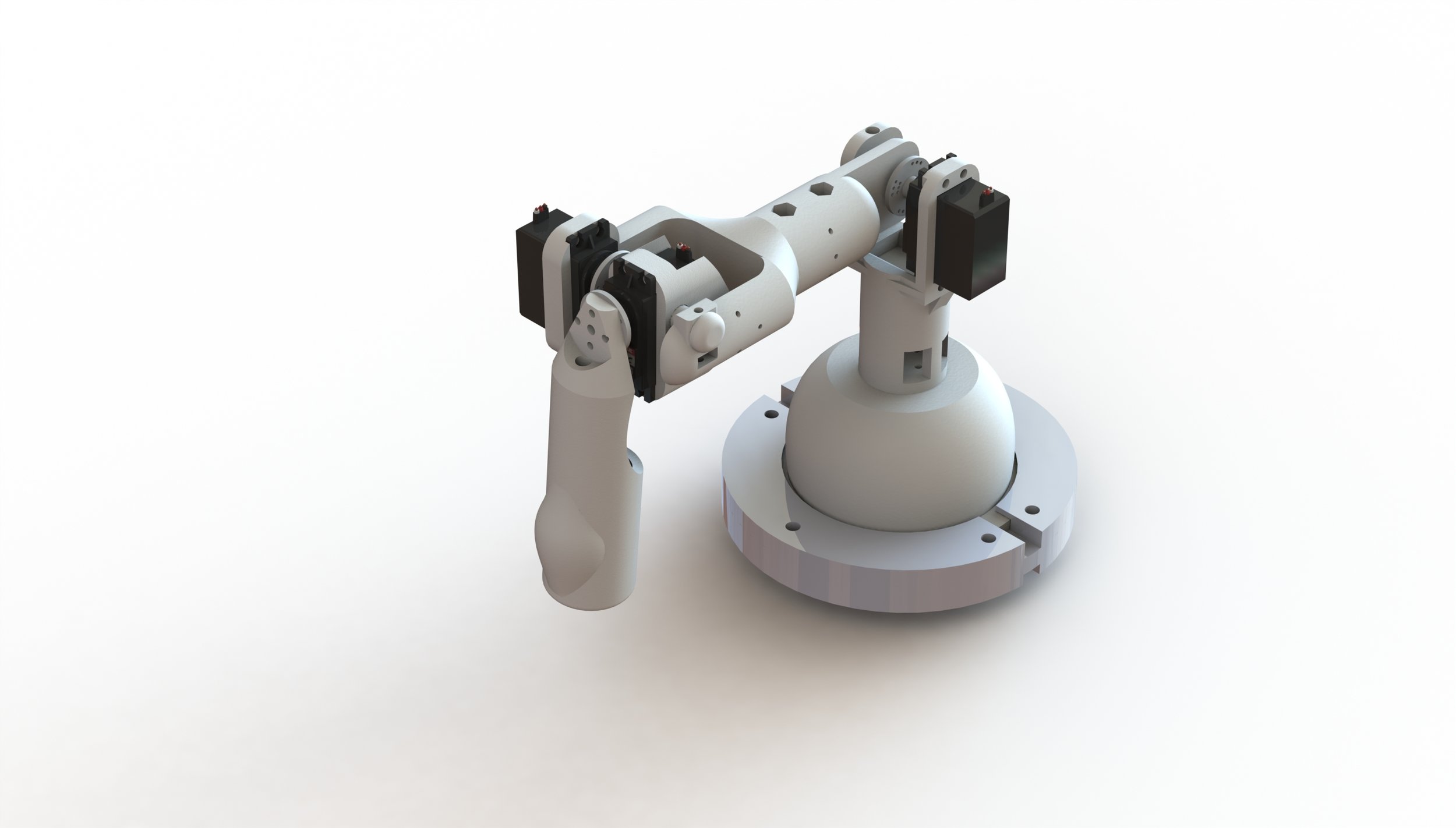
Concept-
Using analog feedback servos, the joystick can reposition itself between “rover mode” and “arm mode”. In “rover mode”, the joystick can be used as a traditional joystick with 360 degrees of freedom. Once “arm mode” is toggled, the joystick adjusts itself to mimic the real-time position of the robot arm. The user can then twist and move the joystick to control the robot arm just as they would in a gum-ball interface.